前言
线程是轻量级的进程(LWP: light weight process),在 Linux 环境下线程的本质是进程。进程是资源分配的最小单位,线程是操作系统调度执行的最小单位。
进程
进程有自己独立的地址空间,多个线程共用同一个地址空间。
进程是操作系统中最小的资源分配单位。
每个进程对应一个虚拟地址空间,一个进程只能抢一个 CPU 时间片。
线程
线程比进程更加节省系统资源,效率更高。
每个线程都有属于自己的栈区和寄存器。
代码段、堆区、全局数据区和打开的文件(文件描述符表)是的线程共享的。
线程是程序的最小执行单位。
一个地址空间中可以划分出多个线程,在有效的资源基础上,能够抢更多的 CPU 时间片。
线程的上下文切换比进程要快的多。
线程更加廉价,启动速度更快,退出速度也快,对系统资源的冲击小。
进程和线程的分时复用 CPU 时间片时,在切换之前会将上一个任务的状态进行保存,下次切换回这个任务的时候,加载这个状态继续运行,任务从保存到再次加载这个过程是一次上下文切换。
在处理多任务时,使用线程比使用进程更有优势。
建议的线程数:
文件 IO 操作: 文件 IO 对 CPU 使用率不高,线程的个数 = 2 * CPU 的核心数高 CPU 的算法操作: 线程的个数 = CPU 的核心数
操作系统:Ubuntu 20.04.4 LTS
参考文档
创建线程
线程的 ID 类型为 pthread_t,本质是无符号长整型。
返回当前线程ID的函数
pthread_t pthread_self(void);创建线程的函数
#include <pthread.h>
int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine)(void *), void *arg);thread: 传出参数,该指针指向的内存用于保存线程 ID。attr: 线程的属性,一般为 NULL。start_routine: 函数指针。arg: 函数指针start_routine的实参。返回值: 线程创建成功返回 0。
函数指针 start_routine 的类型为 void * (*start_routine)(void *)。
// pthread_create.c
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
void* working(void* arg)
{
printf("子线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 9; ++i)
{
printf("child i = %d\n", i);
}
return NULL;
}
int main()
{
pthread_t tid;
pthread_create(&tid, NULL, working, NULL);
printf("子线程创建成功,ID:%ld\n", tid);
printf("主线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 3; ++i)
{
printf("main i = %d\n", i);
}
// 挂起主线程,使得子线程有机会抢到 CPU 时间片
sleep(1);
return 0;
}线程的动态链接库为libpthread.so
gcc pthread_create.c -lpthread
./a.out正常情况下,主线程控制虚拟地址空间(虚拟地址空间的生命周期和主线程相同),当主线程退出时,虚拟地址空间将被释放,因此子线程也将被销毁。但是子线程退出时,不会释放虚拟地址空间。
线程退出
线程退出函数,只会退出该线程,并不会释放虚拟地址空间(主线程)。
#include <pthread.h>
void pthread_exit(void *retval);retval: 线程退出时返回的数据,主线程会得到该子线程的该数据。如果没有返回的数据,retval指定为 NULL。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
void* working(void* arg)
{
sleep(1);
printf("子线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 9; ++i)
{
if(i == 6)
{
pthread_exit(NULL);
}
printf("child i = %d\n", i);
}
return NULL;
}
int main()
{
pthread_t tid;
pthread_create(&tid, NULL, working, NULL);
printf("子线程创建成功,ID:%ld\n", tid);
printf("主线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 3; ++i)
{
printf("main i = %d\n", i);
}
// 主线程调用退出函数退出时,虚拟地址空间不会被释放
pthread_exit(NULL);
return 0;
}线程回收
线程回收函数是 pthread_join(),该函数会阻塞当前线程(一般为主线程),直到要回收的子线程退出。可以通过该函数获得子线程退出时返回的数据。
#include <pthread.h>
int pthread_join(pthread_t thread, void **retval)thread: 子线程的 ID。retval: 传出参数,该块内存保存了子线程中的pthread_exit()方法传递出的数据。如果不需要该参数获得子线程返回的数据,指定为 NULL。返回值: 线程回收成功返回 0。
数据保存在子线程的栈区
// pthread_join.c
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
struct Person
{
int id;
char name[36];
int age;
};
void* working(void* arg)
{
printf("子线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 9; ++i)
{
printf("child i = %d\n", i);
if(i == 6)
{
struct Person p;
p.age = 12;
strcpy(p.name, "susu");
p.id = 1;
pthread_exit(&p);
}
}
return NULL;
}
int main()
{
pthread_t tid;
pthread_create(&tid, NULL, working, NULL);
printf("子线程创建成功,ID:%ld\n", tid);
printf("主线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 3; ++i)
{
printf("main i = %d\n", i);
}
void* ptr = NULL;
pthread_join(tid, &ptr);
struct Person* pp = (struct Person*)ptr;
pritnf("子线程返回数据 name: %s, age: %d, id: %d\n", pp->name, pp->age, pp->id);
printf("子线程资源被成功回收...\n");
return 0;
}编译并执行程序
gcc pthread_join.c -lpthread
./a.out运行结果显示主线程并没有获取子线程返回的数据,由于子线程的栈区的生命周期与子线程相同,因此当子线程退出后,子线程的栈区将被回收,主线程并不能得到子线程返回的栈区数据。
数据保存在全局变量中
位于同一个虚拟地址空间中的线程,可以共享全局数据区和堆区数据(全局变量、静态变量和堆内存)。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
struct Person
{
int id;
char name[36];
int age;
};
struct Person p;
void* working(void* arg)
{
printf("子线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 9; ++i)
{
printf("child i = %d\n", i);
if(i == 6)
{
p.age = 12;
strcpy(p.name, "susu");
p.id = 1;
pthread_exit(&p);
}
}
return NULL;
}
int main()
{
pthread_t tid;
pthread_create(&tid, NULL, working, NULL);
printf("子线程创建成功,ID:%ld\n", tid);
printf("主线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 3; ++i)
{
printf("main i = %d\n", i);
}
void* ptr = NULL;
pthread_join(tid, &ptr);
// ptr(需要转换类型为 struct Person*) 和 p 都可以访问子线程传出的数据
struct Person* pp = (struct Person*)ptr;
pritnf("子线程返回数据 name: %s, age: %d, id: %d\n", pp->name, pp->age, pp->id);
printf("子线程资源被成功回收...\n");
return 0;
}数据保存在主线程栈区中
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
struct Person
{
int id;
char name[36];
int age;
};
void* working(void* arg)
{
struct Person* p = (struct Person*)arg;
printf("子线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 9; ++i)
{
printf("child i = %d\n", i);
if(i == 6)
{
p->age = 12;
strcpy(p->name, "susu");
p->id = 1;
pthread_exit(p);
}
}
return NULL;
}
int main()
{
pthread_t tid;
struct Person p;
pthread_create(&tid, NULL, working, &p);
printf("子线程创建成功,ID:%ld\n", tid);
printf("主线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 3; ++i)
{
printf("main i = %d\n", i);
}
void* ptr = NULL;
pthread_join(tid, &ptr);
// ptr(需要转换类型为 struct Person*) 和 p 都可以访问子线程传出的数据
pritnf("子线程返回数据 name: %s, age: %d, id: %d\n", p.name, p.age, p.id);
printf("子线程资源被成功回收...\n");
return 0;
}线程分离
线程分离函数 pthread_detach() 可以使子线程和主线程分离,子线程退出时会被其他进程回收。
#include <pthread.h>
int pthread_detach(pthread_t thread);主线程和子线程的分离
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
void* working(void* arg)
{
printf("字线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 9; ++i)
{
printf("child i = %d\n", i);
}
return NULL;
}
int main()
{
pthread_t tid;
pthread_create(&tid, NULL, working, NULL);
printf("子线程创建成功,ID:%ld\n", tid);
printf("主线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 3; ++i)
{
printf("main i = %d\n", i);
}
pthread_detach(tid);
pthread_exit(NULL);
return 0;
}线程取消
线程取消函数 pthread_cancel 可以使一个线程 kill 另一个线程。下面是 kill 一个线程的步骤:
线程 A 中调用线程取消函数
pthread_cancel,指定杀死线程 B。线程 B 调用一次系统调用(内核函数即系统函数)。
线程 B 被 kill。
#include <pthread.h>
int pthread_cancel(pthread_t thread);thread: 要 kill 的线程的 ID。返回值: 函数调用成功返回 0。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
void* working(void* arg)
{
int j = 0;
for(int i = 0; i < 9; ++i)
{
j++;
}
// printf 函数会调用系统函数
printf("子线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 9; ++i)
{
printf("child i = %d\n", i);
}
return NULL;
}
int main()
{
pthread_t tid;
pthread_create(&tid, NULL, working, NULL);
printf("子线程创建成功,ID:%ld\n", tid);
printf("主线程,ID:%ld\n", pthread_self());
for(int i = 0; i < 3; ++i)
{
printf("main i = %d\n", i);
}
pthread_cancel(tid);
pthread_exit(NULL);
return 0;
}系统调用的两种方式:
直接调用 Linux 系统函数。
调用 C 语言的标准库函数。
线程 ID 比较
线程 ID 的类型本质是无符号长整型,因此可以直接用比较运算符比较。也可以使用 线程 ID 比较函数 比较。
#include <pthread.h>
int pthread_equal(pthread_t t1, pthread_t t2);t1和t2: 要比较的线程 ID。返回值: 相等返回非 0 值,不相等返回 0。
线程同步
线程同步保证多个线程只能有一个线程在访问共享资源。保证共享资源对于所有线程具有一致性。
不进行线程同步
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <string.h>
#include <pthread.h>
#define MAX 50
int number;
void* funcA_num(void* arg)
{
for(int i = 0; i < MAX; ++i)
{
int cur = number;
cur++;
usleep(10);
number = cur;
printf("Thread A, id = %lu, number = %d\n", pthread_self(), number);
}
return NULL;
}
void* funcB_num(void* arg)
{
for(int i = 0; i < MAX; ++i)
{
int cur = number;
cur++;
number = cur;
printf("Thread B, id = %lu, number = %d\n", pthread_self(), number);
usleep(5);
}
return NULL;
}
int main(int argc, const char* argv[])
{
pthread_t p1, p2;
pthread_create(&p1, NULL, funcA_num, NULL);
pthread_create(&p2, NULL, funcB_num, NULL);
pthread_join(p1, NULL);
pthread_join(p2, NULL);
return 0;
}编译并执行上面代码,可以发现最终的 number 小于 100。
CPU 的寄存器、一级缓存、二级缓存和三级缓存对于每个线程是独占的,用于存储处理的数据和线程的状态信息,即分时复用 CPU 时间片时上下文切换保存的状态。线程计算完成的数据需要从 CPU 保存到内存中,最终再通过文件 IO 将数据从内存保存到磁盘中。
当某一个线程未将某一循环中计算完成的数据保存到内存中时,失去了 CPU 时间片。另一个得到 CPU 时间片的线程从物理内存读取数据。因此这个线程只能基于旧数据计算,并将计算后的数据保存到内存中,然后继续循环计算,直到这个线程失去了 CPU 时间片。由于我们上面的例子中只有两个线程,上一个失去CPU 时间片获得 CPU 时间片,将还未来得及保存到内存的数据保存到内存中,覆盖了另一个线程保存的数据。因此导致最终的 number 小于 100。
线程同步共有 4 种,互斥锁、读写锁、条件变量 和 信号量。共享资源被称为临界资源。临界资源相关的上下文代码块被称为临界区。
线程同步:需要在临界区上边添加锁函数,对临界区加锁;在临界区下边添加解锁函数,对临界区解锁。某一线程会将临界区锁定,防止其他线程和它同时访问临界区,等到它访问完成,对临界区解锁,其他被阻塞且抢到锁的线程对临界区加锁,访问临界区。
锁机制保证任何时刻只能有一个线程可以访问临界区。
互斥锁
互斥锁的类型为 pthread_mutex_t。该类型保存了锁的状态:锁定还是未锁定;加锁的线程 ID。一个互斥锁只能被一个线程锁定,其他想对临界区加锁的线程将被阻塞。直到这把互斥锁被加锁的线程解锁,被阻塞的线程才能解除阻塞。互斥锁的数量和共享资源的个数相同。
pthread_mutex_t mutex;只有 restrict 修饰的指针可以访问该地址。
// 初始化互斥锁
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
// 释放互斥锁
int pthread_mutex_destroy(pthread_mutex_t *mutex);mutex: 互斥锁变量的地址。attr: 互斥锁的属性,一般为 NULL。
// 加锁
int pthread_mutex_lock(pthread_mutex_t *mutex);// 尝试加锁
// 如果锁没有被锁定,则加锁成功;如果锁已被锁定,则尝试加锁的线程不会被阻塞
int pthread_mutex_trylock(pthread_mutex_t *mutex);// 解锁
int pthread_mutex_unlock(pthread_mutex_t *mutex);进行线程同步
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <string.h>
#include <pthread.h>
#define MAX 50
int number;
pthread_mutex_t mutex;
void* funcA_num(void* arg)
{
for(int i = 0; i < MAX; ++i)
{
pthread_mutex_lock(&mutex);
int cur = number;
cur++;
usleep(10);
number = cur;
pthread_mutex_unlock(&mutex);
printf("Thread A, id = %lu, number = %d\n", pthread_self(), number);
}
return NULL;
}
void* funcB_num(void* arg)
{
for(int i = 0; i < MAX; ++i)
{
pthread_mutex_lock(&mutex);
int cur = number;
cur++;
number = cur;
pthread_mutex_unlock(&mutex);
printf("Thread B, id = %lu, number = %d\n", pthread_self(), number);
usleep(5);
}
return NULL;
}
int main()(int argc, const char* argv[])
{
pthread_t p1, p2;
pthread_mutex_init(&mutex, NULL);
pthread_create(&p1, NULL, funcA_num, NULL);
pthread_create(&p2, NULL, funcB_num, NULL);
pthread_join(p1, NULL);
pthread_join(p2, NULL);
pthread_mutex_destroy(&mutex);
return 0;
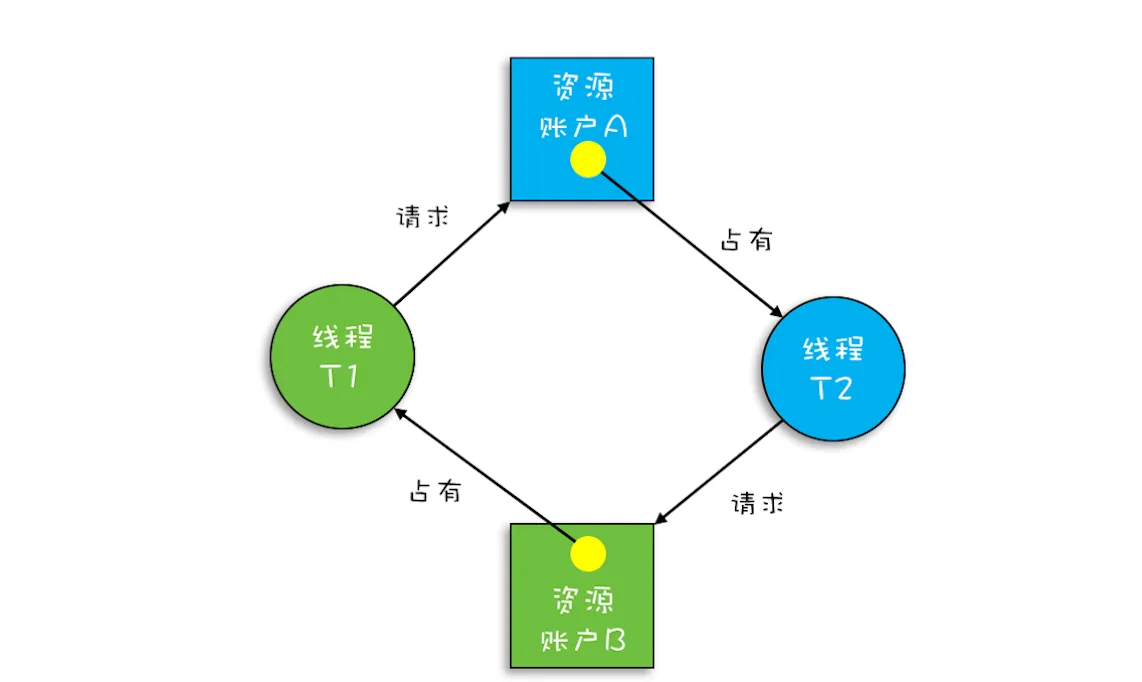
}死锁
死锁现象:所有的线程都被阻塞,并且所有线程的阻塞都无法解开(解锁的线程也被阻塞了)。
死锁现象1——加锁之后忘记解锁
void func()
{
for(int i = 0; i < 6; ++i)
{
pthread_mutex_lock(&mutex);
}
}void func()
{
for(int i = 0; i < 6; ++i)
{
pthread_mutex_lock(&mutex);
if (condition)
{
return;
}
pthread_mutex_unlock(&mutex);
}
}死锁现象2——重复加锁
void func()
{
for(int i = 0; i < 6; ++i)
{
pthread_mutex_lock(&mutex);
pthread_mutex_lock(&mutex);
pthread_mutex_unlock(&mutex);
}
}void funcA()
{
for(int i = 0; i < 6; ++i)
{
pthread_mutex_lock(&mutex);
pthread_mutex_unlock(&mutex);
}
}
void funcB()
{
for(int i = 0; i < 6; ++i)
{
pthread_mutex_lock(&mutex);
funcA();
pthread_mutex_unlock(&mutex);
}
}死锁现象3——多个共享资源,多个线程,随意加锁
避免死锁
避免多次锁定。
对共享资源访问完毕之后,一定要解锁。
控制多个共享资源访问顺序,即控制加锁解锁顺序。
对其他互斥锁加锁前,先释放拥有的互斥锁。
读写锁
读写锁是互斥锁的升级版,读操作是并行的。读写锁的类型为 pthread_rwlock_t。该类型包含以下信息:锁定 / 打开、读操作 / 写操作 和 线程 ID。
pthread_rwlock_t rwlock;读写锁 锁定了 读操作,需要先解锁才能去锁定写操作,反之亦然。
读写锁的使用方式和互斥锁的使用方式完全相同。
使用读写锁的
读锁锁定了临界区,线程对临界区的访问是并行的,读锁是共享的。使用读写锁的
写锁锁定了临界区,线程对临界区的访问是串行的,写锁是独占的。两个线程要同时访问
读锁和写锁锁定的两个临界区。访问写锁锁定的临界区线程先访问,访问读锁锁定的临界区的线程被阻塞。写锁的优先级更高。读写锁对读操作比写操作多的场景有优势。
#include <pthread.h>
pthread_rwlock_t rwlock;
// 初始化读写锁
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock, const pthread_rwlockattr_t *restrict attr);
// 释放读写锁
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);rwlock: 读写锁变量的地址。attr: 读写锁的属性,一般为 NULL。
// 加读锁
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);// 尝试加读锁,加锁失败,不会阻塞当前线程
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);// 加写锁
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);// 尝试加写锁,加锁失败,不会阻塞当前线程
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);// 解锁,读锁和写锁都可以解锁
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);读写锁的使用
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
int number = 0;
pthread_rwlock_t rwlock;
void* writeNum(void* arg)
{
while(1)
{
pthread_rwlock_wrlock(&rwlock);
int cur = number;
cur++;
number = cur;
printf("写操作完毕,number = %d, tid = %ld\n", number, pthread_self());
pthread_rwlock_unlock(&rwlock);
usleep(rand() % 100);
}
return NULL;
}
void* readNum(void* arg)
{
while(1)
{
pthread_rwlock_rdlock(&rwlock);
printf("读操作完毕,number = %d, tid = %ld\n", number, pthread_self());
pthread_rwlock_unlock(&rwlock);
usleep(rand() % 100);
}
return NULL;
}
int main()
{
pthread_rwlock_init(&rwlock, NULL);
pthread_t wtid[3];
pthread_t rtid[5];
for(int i = 0; i < 3; ++i)
{
pthread_create(&wtid[i], NULL, writeNum, NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_create(&rtid[i], NULL, readNum, NULL);
}
for(int i = 0; i < 3; ++i)
{
pthread_join(wtid[i], NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_join(rtid[i], NULL);
}
pthread_rwlock_destroy(&rwlock);
return 0;
}条件变量
条件变量
条件变量在满足条件时会阻塞线程。条件变量配合互斥锁用于处理生产者和消费者模型。
条件变量类型为 pthread_cond_t,被条件变量阻塞的线程的信息被记录在这个类型变量中。
pthread_cond_t cond;#include <pthread.h>
pthread_cond_t cond;
// 初始化
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
// 释放资源
int pthread_cond_destroy(pthread_cond_t *cond);cond: 条件变量的地址。attr: 条件变量的属性,一般为 NULL。
// 线程阻塞函数
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);pthread_cond_wait函数的作用可以参考下面例子(生产者和消费者问题)中的消费者线程函数(consumer函数)。在
阻塞消费者线程时候(内层的while循环),该函数会把当前消费者线程之前上的锁mutex打开。当
消费者线程解除阻塞时候,该函数会帮助这个消费者线程将这个mutex互斥锁再次锁上。消费者线程继续访问临界区。
// 时间是从 1971.1.1 0:0:0 到当前的时间,总长度是两个成员变量的和。
struct timespec {
// Seconds
time_t tv_sec;
// Nanoseconds
long tv_nsec;
};
// 阻塞线程一段时间
int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);// 时间是从 1971.1.1 0:0:0 到当前的时间,总秒数
time_t mytime = time(NULL);
struct timespec tmsp;
// 线程阻塞 100s
tmsp.tv_sec = time(NULL) + 100;
tmsp.tv_nsec = 0;// 唤醒阻塞在条件变量上的线程,至少有一个线程被解除阻塞
int pthread_cond_signal(pthread_cond_t *cond);
// 唤醒阻塞在条件变量上的线程,被阻塞的线程全部被解除阻塞
int pthread_cond_broadcast(pthread_cond_t *cond);生产者和消费者问题
生产者消费者问题(英语:Producer-consumer problem),也称有限缓冲问题(英语:Bounded-buffer problem),是一个多线程同步问题的经典案例。该问题描述了两个共享固定大小缓冲区的线程——即所谓的“生产者”和“消费者”——在实际运行时会发生的问题。生产者的主要作用是生成一定量的数据放到缓冲区中,然后重复此过程。与此同时,消费者也在缓冲区消耗这些数据。该问题的关键就是要保证生产者不会在缓冲区满时加入数据,消费者也不会在缓冲区中空时消耗数据。该问题也能被推广到多个生产者和消费者的情形。

场景描述:使用条件变量和互斥锁实现生产者和消费者模型,生产者和消费者各 5 个,生产者在链表头部添加节点;消费者在链表头部删除节点。由于缓存区是链表,所以生产者可以一直生产。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
struct Node
{
int number;
struct Node* next;
};
pthread_cond_t cond;
pthread_mutex_t mutex;
struct Node * head = NULL;
void* producer(void* arg)
{
while(1)
{
pthread_mutex_lock(&mutex);
struct Node* pnew = (struct Node*)malloc(sizeof(struct Node));
pnew->number = rand() % 1000;
pnew->next = head;
head = pnew;
printf("producer, number = %d, tid = %ld\n", pnew->number, pthread_self());
pthread_mutex_unlock(&mutex);
pthread_cond_broadcast(&cond);
sleep(rand() % 3);
}
return NULL;
}
void* consumer(void* arg)
{
while(1)
{
pthread_mutex_lock(&mutex);
// 一定要用循环,不要用 if 条件判断
while(head == NULL)
{
pthread_cond_wait(&cond, &mutex);
}
struct Node* pnode = head;
printf("consumer, number = %d, tid = %ld\n", pnode->number, pthread_self());
head = pnode->next;
free(pnode);
pthread_mutex_unlock(&mutex);
sleep(rand() % 3);
}
return NULL;
}
int main()
{
pthread_cond_init(&cond, NULL);
pthread_mutex_init(&mutex, NULL);
pthread_t ptid[5];
pthread_t ctid[5];
for(int i = 0; i < 5; ++i)
{
pthread_create(&ptid[i], NULL, producer, NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_create(&ctid[i], NULL, consumer, NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_join(ptid[i], NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_join(ctid[i], NULL);
}
pthread_cond_destroy(&cond);
pthread_mutex_destroy(&mutex);
return 0;
}信号量
信号量 如它的名字一样可以指示资源的可用情况,它配合互斥锁也可以处理生产者和消费者模型,它也被称为 信号灯。
使用信号量需要引用头文件 <semaphore.h>。信号量的类型为 sem_t。
#include <semaphore.h>
sem_t sem;#include <semaphore.h>
// 初始化
int sem_init(sem_t *sem, int pshared, unsigned int value);
// 释放资源
int sem_destroy(sem_t *sem);sem: 信号量变量的地址。pshared:0表示线程同步,非 0表示进程同步。value: 初始化信号量拥有的资源数(>=0),如果资源数为0, 线程将被阻塞。
// 资源数 -1
int sem_wait(sem_t *sem);线程调用 sem_wait 函数,如果资源数 >0,线程不会被阻塞,资源数 -1;如果资源数 =0,线程被阻塞。
// 当资源数 >0,效果等同于 sem_wait;当资源数 =0,线程不会被阻塞
int sem_trywait(sem_t *sem);// 时间是从 1971.1.1 0:0:0 到当前的时间,总长度是两个成员变量的和。
struct timespec {
// Seconds
time_t tv_sec;
// Nanoseconds
long tv_nsec;
};
// 当资源数 >0,效果等同于 sem_wait;当资源数 =0,线程会阻塞一段时间
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);// 资源数 +1,如果有线程因为资源数为 0 而被阻塞,这时这些线程会被解除阻塞,进而访问临界区
int sem_post(sem_t *sem);// 获得资源数,sval 是一个传出参数,sval 和返回值的作用一样。
int sem_getvalue(sem_t *sem, int *sval);生产者和消费者问题
场景描述:使用信号量和互斥锁实现生产者和消费者模型,生产者和消费者各 5 个,生产者在链表头部添加节点;消费者在链表头部删除节点。
总资源数为1
由于生产者和消费者的总资源数为 1,所以任何时刻可以工作的线程只能有一个,不需要互斥锁。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <semaphore.h>
#include <pthread.h>
struct Node
{
int number;
struct Node* next;
};
sem_t psem;
sem_t csem;
pthread_mutex_t mutex;
struct Node * head = NULL;
void* producer(void* arg)
{
while(1)
{
sem_wait(&psem);
struct Node* pnew = (struct Node*)malloc(sizeof(struct Node));
pnew->number = rand() % 1000;
pnew->next = head;
head = pnew;
printf("producer, number = %d, tid = %ld\n", pnew->number, pthread_self());
sem_post(&csem);
sleep(rand() % 3);
}
return NULL;
}
void* consumer(void* arg)
{
while(1)
{
sem_wait(&csem);
struct Node* pnode = head;
printf("consumer, number = %d, tid = %ld\n", pnode->number, pthread_self());
head = pnode->next;
free(pnode);
sem_post(&psem);
sleep(rand() % 3);
}
return NULL;
}
int main()
{
sem_init(&psem, 0, 1);
sem_init(&csem, 0, 0);
pthread_t ptid[5];
pthread_t ctid[5];
for(int i = 0; i < 5; ++i)
{
pthread_create(&ptid[i], NULL, producer, NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_create(&ctid[i], NULL, consumer, NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_join(ptid[i], NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_join(ctid[i], NULL);
}
sem_destroy(&psem);
sem_destroy(&csem);
return 0;
}总资源数大于1
由于生产者和消费者的总资源数大于 1,所以需要互斥锁。信号量和互斥锁的函数在线程函数( producer 和 consumer )中调用顺序不能颠倒。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <semaphore.h>
#include <pthread.h>
struct Node
{
int number;
struct Node* next;
};
sem_t psem;
sem_t csem;
pthread_mutex_t mutex;
struct Node * head = NULL;
void* producer(void* arg)
{
while(1)
{
sem_wait(&psem);
pthread_mutex_lock(&mutex);
struct Node* pnew = (struct Node*)malloc(sizeof(struct Node));
pnew->number = rand() % 1000;
pnew->next = head;
head = pnew;
printf("producer, number = %d, tid = %ld\n", pnew->number, pthread_self());
pthread_mutex_unlock(&mutex);
sem_post(&csem);
sleep(rand() % 3);
}
return NULL;
}
void* consumer(void* arg)
{
while(1)
{
sem_wait(&csem);
pthread_mutex_lock(&mutex);
struct Node* pnode = head;
printf("consumer, number = %d, tid = %ld\n", pnode->number, pthread_self());
head = pnode->next;
free(pnode);
pthread_mutex_unlock(&mutex);
sem_post(&psem);
sleep(rand() % 3);
}
return NULL;
}
int main()
{
sem_init(&psem, 0, 5);
sem_init(&csem, 0, 0);
pthread_mutex_init(&mutex, NULL);
pthread_t ptid[5];
pthread_t ctid[5];
for(int i = 0; i < 5; ++i)
{
pthread_create(&ptid[i], NULL, producer, NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_create(&ctid[i], NULL, consumer, NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_join(ptid[i], NULL);
}
for(int i = 0; i < 5; ++i)
{
pthread_join(ctid[i], NULL);
}
sem_destroy(&psem);
sem_destroy(&csem);
pthread_mutex_destroy(&mutex);
return 0;
}结语
第十四篇博文写完,开心!!!!
今天,也是充满希望的一天。